This project was an eight-month collaborative engineering effort in which my team and I designed a multi-terrain autonomous robot. The robot’s purpose was to identify a designated object, navigate toward it while avoiding restricted zones, pick it up, and deliver it to a specified location. The challenge required us to integrate mechanical, electrical, and software systems into one functioning platform. It served as a strong introduction to full-system engineering design.
The goal was to develop a robot that was both reliable and efficient in performing its task. The system had to recognize valid and invalid objects, move across uneven surfaces, and handle objects securely during transport. Because this was a competitive design problem, speed, mobility, and repeatability were key metrics. We knew from the start that the mechanism and control strategy would require multiple iterations.
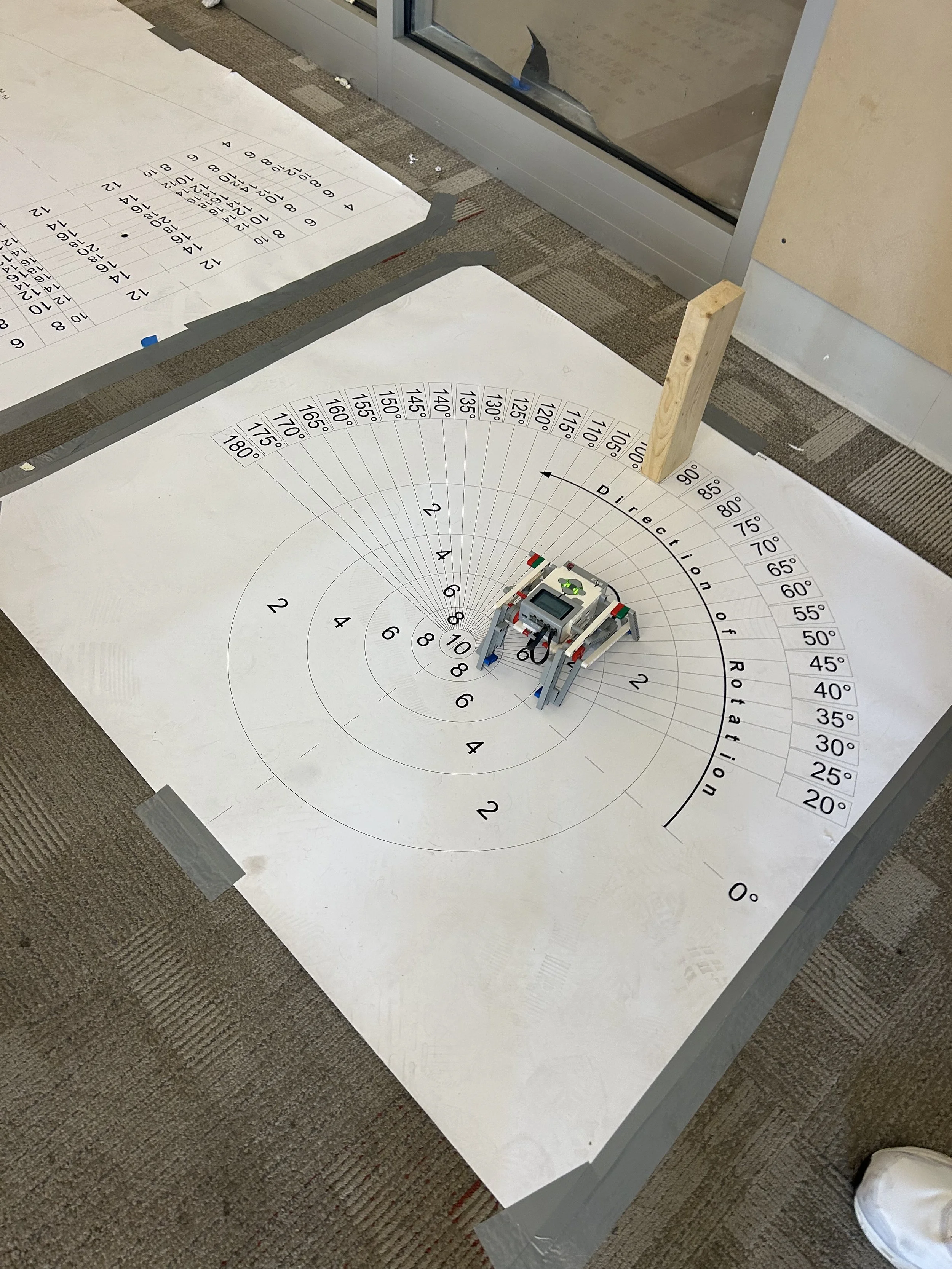
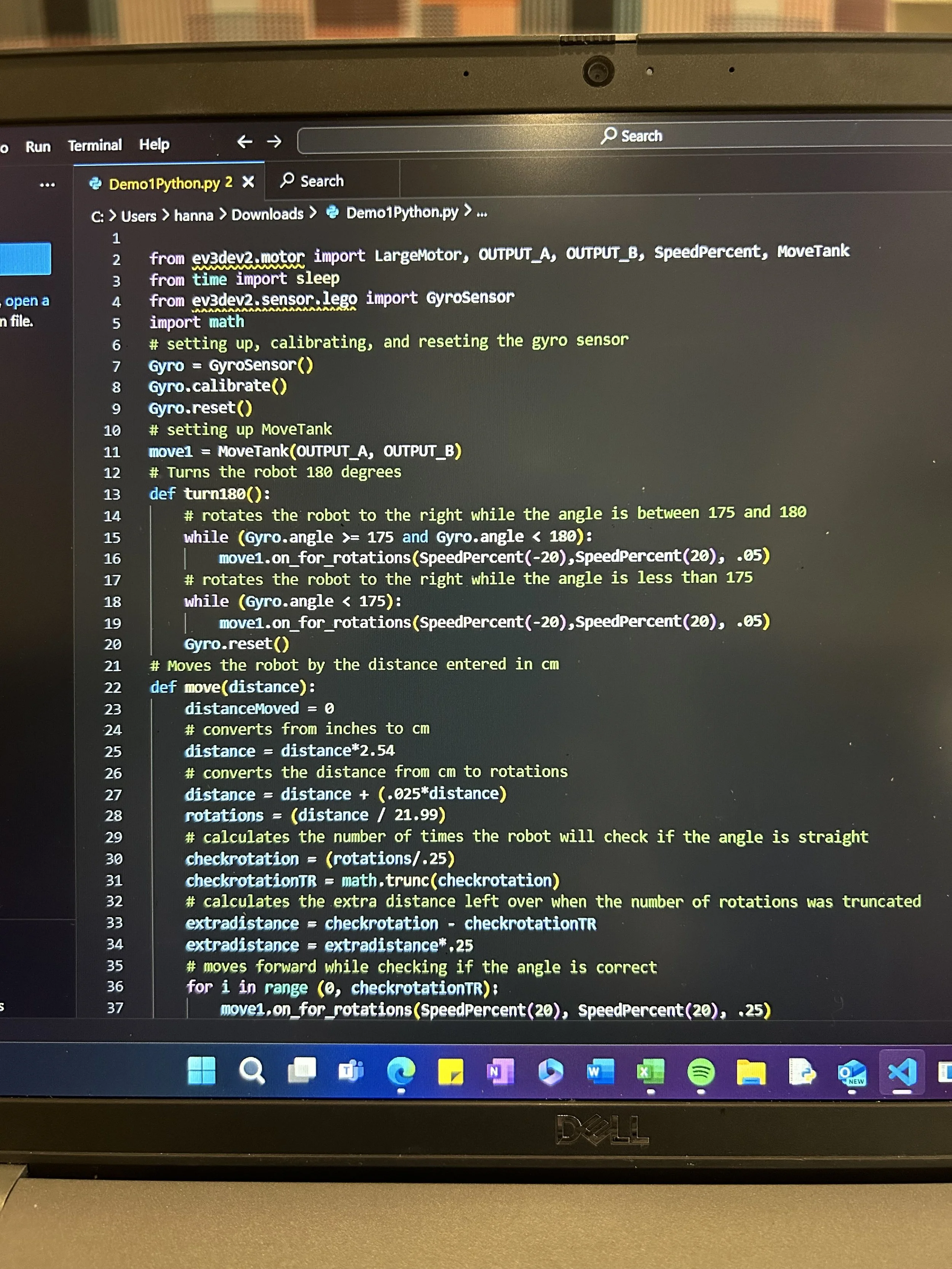
The control logic was developed using LabVIEW and Python through LEGO MINDSTORMS hardware. The robot’s movement, sensing, and object-handling systems were coordinated through structured programming and sensor feedback loops. Integrating hardware responses with real-time sensor input required careful calibration and testing. This phase emphasized the importance of robust sensor logic and control tuning.
I served as the team lead throughout the project. I proposed the initial robot concept, wrote the first LabVIEW control framework, and contributed to the mechanical redesign in later iterations. I also organized weekly meetings, set deadlines, delegated tasks based on team strengths, and supported teammates when roadblocks arose. This role helped me develop strong communication and collaborative problem-solving skills.
Objective:
This was an 8-month team project to design a multi-terrain autonomous robot capable of locating a target object, navigating around restricted zones, picking the object up, and delivering it to a designated location.
Solution:
Iteratively develop mechanisms that optimize speed, stability, and reliability — progressing from claw and leg-based concepts to a forklift-style gripper and a tracked mobility platform.
Tools/Skills Used:
LabVIEW, Python, LEGO MINDSTORMS Robotics Platform, Systems Integration, Team Leadership & Collaboration
Approach:
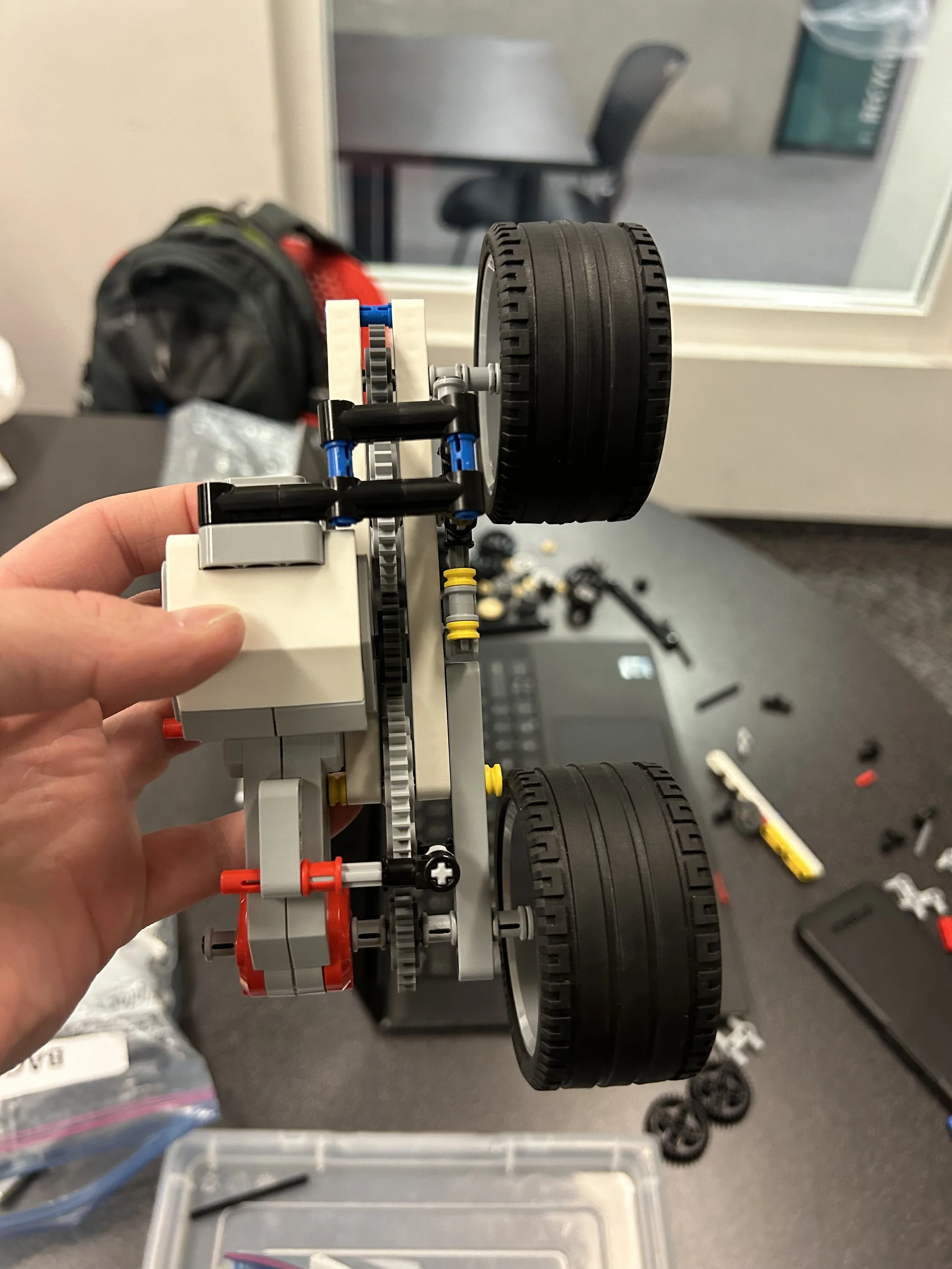
The first prototype used a legged chassis and side-grip claw with a sensor system for package identification. Later iterations switched to a tracked drivetrain paired with a forklift lifting mechanism and ultrasonic sensing for object detection and classification.
My Role:
Served as team lead — proposed the initial design concept, wrote the first LabVIEW control software, co-designed the second-generation forklift mechanism, scheduled meetings, set milestones, and coordinated workloads to keep the team on track.
Results/Impact:
The final robot successfully demonstrated autonomous navigation, object recognition, and retrieval. The project provided foundational experience in mechanical design, sensor integration, controls programming, and collaborative engineering workflow.
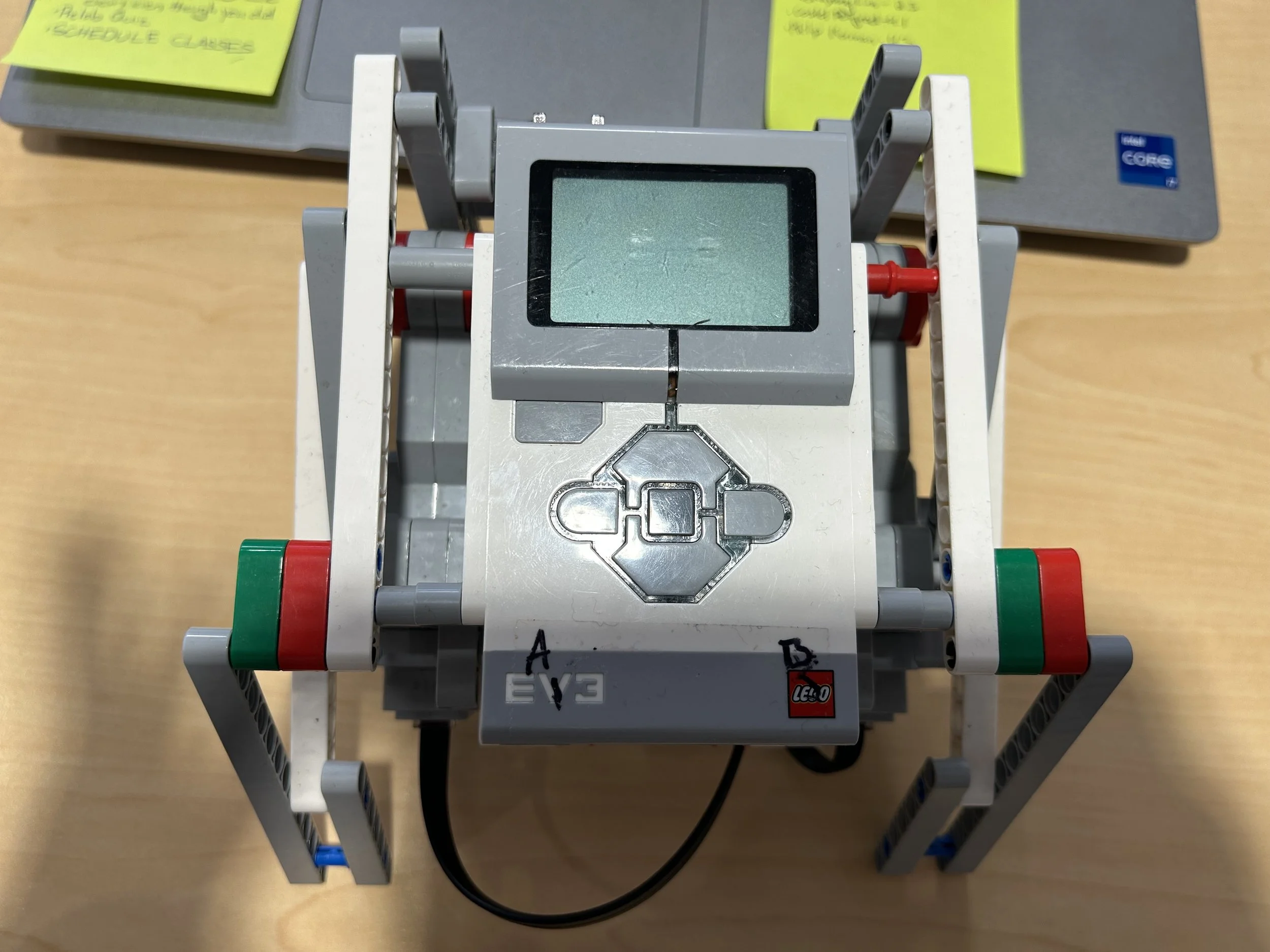
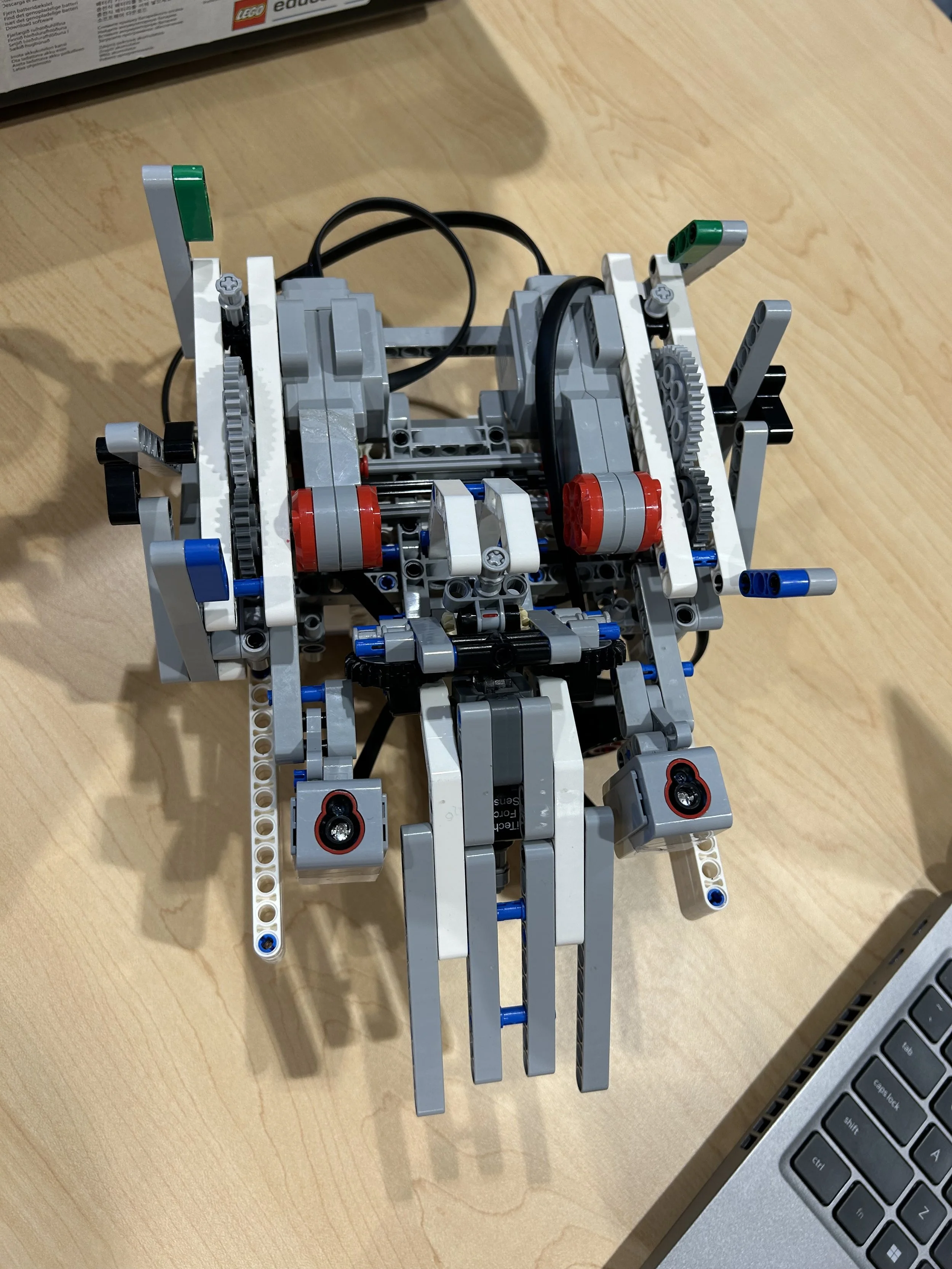
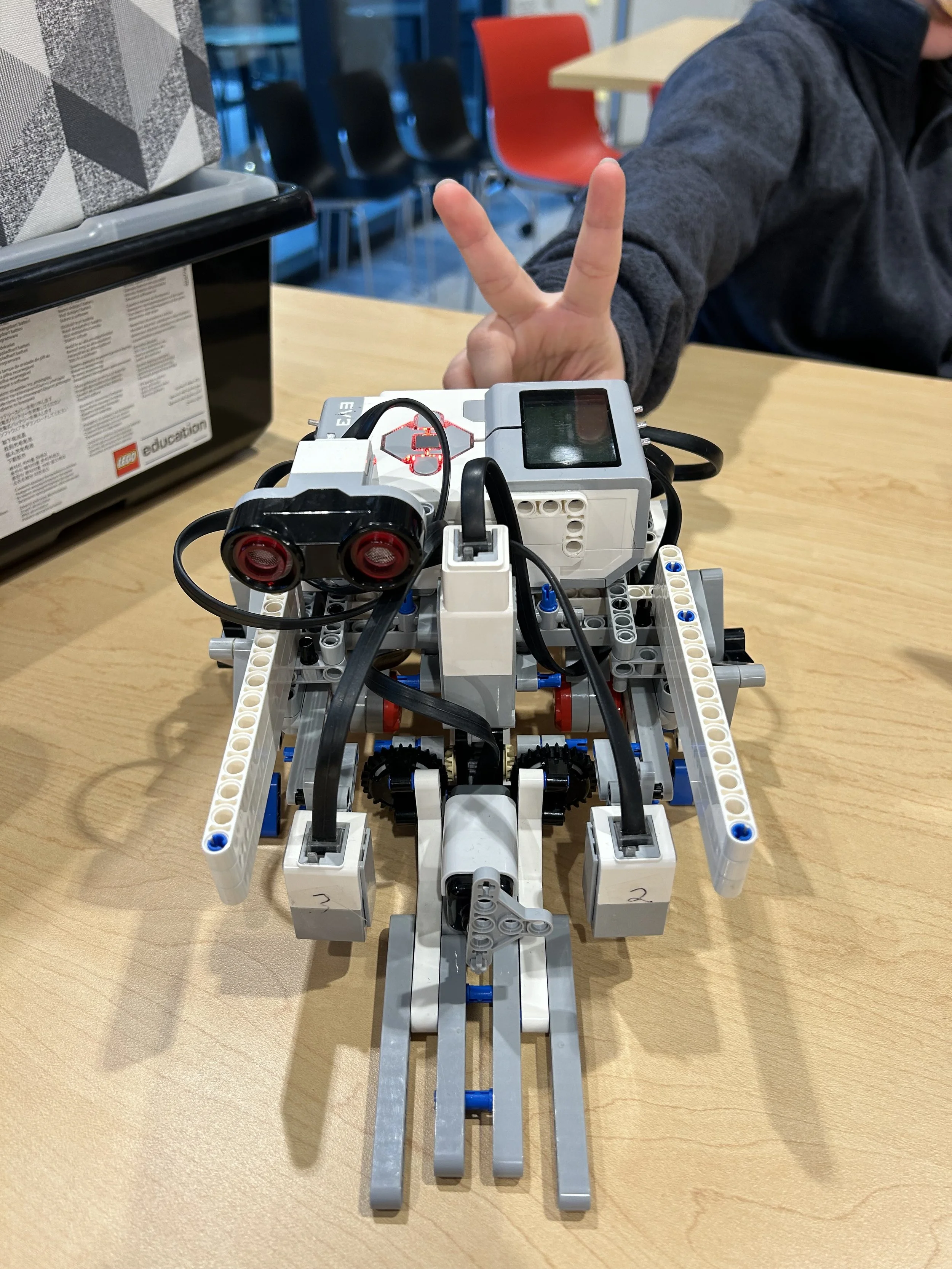
Our first major design concept used a legged chassis paired with a side-grip claw mechanism. The claw was intended to grab objects directly from their resting position, while the leg-based drivetrain would allow the robot to traverse varied terrain. We integrated a sensor system to differentiate between desired and undesired packages. While functional, this design proved mechanically unstable and difficult to control.
In response to these limitations, we transitioned to a tracked drivetrain for better ground contact and stability. At the same time, we replaced the claw with a forklift-style lifting mechanism, which provided more controlled object handling. Ultrasonic sensors were incorporated to detect objects and identify barcodes. These changes significantly improved the robot’s consistency, maneuverability, and reliability.
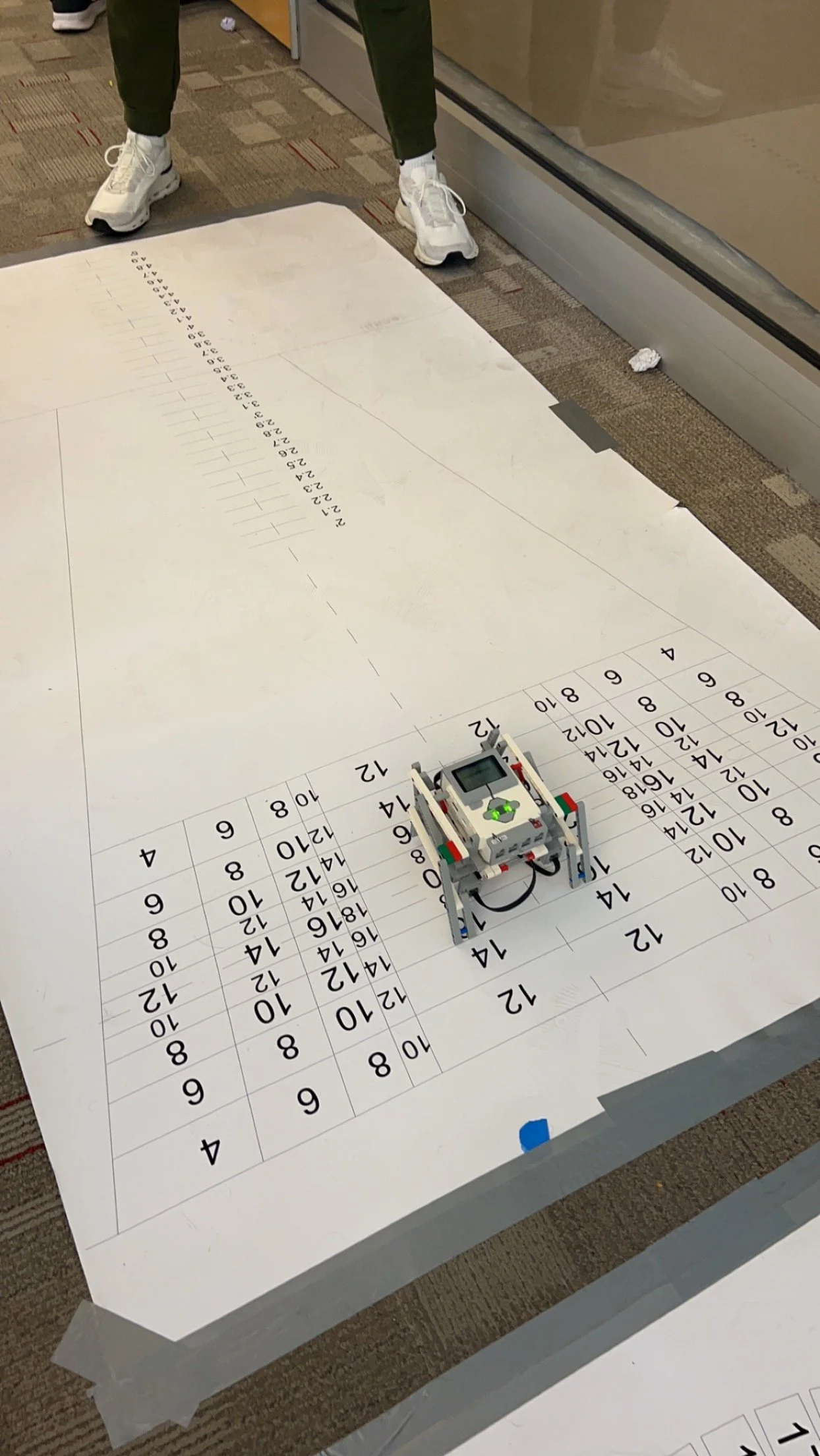
The final robot successfully located, retrieved, and transported objects across multiple terrain types. More importantly, the project taught us fundamental skills in mechanical design, sensor integration, programming, prototyping, and iteration. It demonstrated how different engineering disciplines overlap within a single system. Looking back, this project was a formative experience that set the foundation for how I now approach engineering design challenges.